Robot-assisted, near-net-shape coating of complexsurfaces with thermally sprayed WC-based anti-wearsurfacing coats
Authors: Prof. Dr.-Ing. Dipl.-Wirt.Ing. Wolfgang Tillmann, Prof. Dr.-Ing. Bernd Kuhlenkötter, Dr.-Ing. habil. Evelina Vogli, Dr.-Ing. Ingor Theodor Baumann, Dipl.-Inform. Carsten Scheele, Dipl.-Phys. Ing. Benjamin Krebs
Thermal spraying is frequently utilised for the anti-wear protection of surfaces which are exposed to high mechanical stresses. In this respect, the coating process is normally carried out using industrial robots and is considered to be well-mastered in the case of simple to moderately complex component geometries with regard to the process management as well as to the attained coat quality. However, in industrial practice, the utilised surfaces subjected to wear stresses (e.g. those of tools) often have a complex or freely shaped geometry for which coating strategies cannot be directly generated or derived. The near-net-shape coating
of more complex surfaces such as these sets stringent requirements on the process management during thermal spraying as well as on the associated path planning for the robot system in order to obtain not only uniform coat thicknesses and structural compositions but also constant coat properties. The near-net-shape coating of complex regular-geometrical components with the utilisation of a robot and various coating
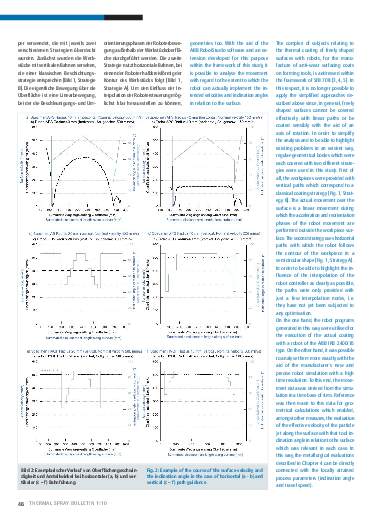
processes such as atmospheric plasma spraying (APS), arc spraying (AS) and high-velocity oxy-fuel spraying (HVOF) using fine powders was investigated within the framework of this study. For this purpose, two different path strategies were generated by means of offline programming and their suitability was tested in the coating process. This method focused on the analysis of the inclination angle and travel speed of the torch as well as on their influence on the coat properties.
Pages: 44 - 53










Order this article as a PDF for 8.00 Euro. Send us a short e-mail with your details.
An active subscription enables you to download articles or entire issues as PDF-files. If you already are a subscriber, please login. More information about the subscription